I will admit, I have never been a big fan of the phrase “for dummies.” That said, it is a common way people search when they are looking for a simple, easy-to-follow explanation. So, with that in mind, let’s break down the basics of PID controllers in a clear and practical way.
PID – Proportional Integral Derivative
A PID controller is used in automation to adjust an output and bring a process value closer to a desired set point.
It does this by monitoring a specific input, known as the process value, comparing it to the set point, and using that difference to calculate the controller output.
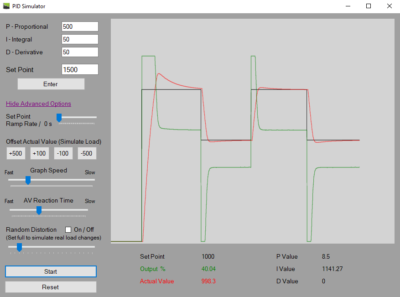
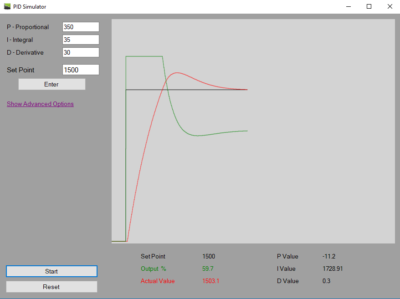
Check out the PID Simulator page to to try the interactive PID simulation tool.
Basic PID Example
Below is a basic, easy-to-understand example of how PID control can be thought of using a familiar system.
In this example:
Process value = vehicle speed
Set point = cruise control speed
Output = throttle adjustment
You are driving down the highway and set cruise control to 100 km/h. When the vehicle reaches a hill, the speed may drop below the set point.
For example, if the set point is 100 km/h and the actual speed drops to 70 km/h, the error value is:
100 – 70 = 30
The controller uses this error value to determine how much the output should change to help bring the process value closer to the desired set point.
In this simplified example, the controller would increase the throttle adjustment until the vehicle speed moves back toward the 100 km/h set point and the error is reduced.
Read “PID Controller Explained!” for an in depth look at how a PID controller works, or check out the video below.
Disclaimer
By accessing, downloading, installing, viewing, or using this application, website, videos, or related content, you acknowledge and agree to the full Disclaimer found at https://pidexplained.com/disclaimer/. This application, website, videos, and related content are provided for general informational and simulation practice purposes only. All settings, values, examples, outputs, demonstrations, and scenarios are simulated examples only, may not be accurate, complete, current, or error-free, and must not be copied, transferred, relied on, or applied to any actual controller, device, equipment, system, or process. This content is not OEM training, real-world tuning guidance, commissioning guidance, field instruction, or a substitute for qualified procedures, OEM documentation, training, or applicable requirements; use of this content does not qualify any person to tune, configure, adjust, or operate any real-world controller, device, equipment, system, or process, and any such work should only be performed by a properly qualified person.